As president and re-founder of the Harvard Undergraduate Robotics Club from 0 members, I lead the development of our Mars rover for the University Rover Challenge (URC). I introduced the competition to Harvard, restarted the team from 0 members, and built it into a thriving group of 50+. At first, my time was spent almost entirely on recruiting, building interest, and researching how URC works—studying the rules, past competitions, and the designs of other rover teams. By the end of the Fall 2024 semester, I had grown the team to about twenty active members and led us through the process of designing our rover from the ground up: mechanical sketches, CAD models in SolidWorks, electrical schematics, software algorithm research like D* Lite search for autonomous navigation, and development of a life-detection science experiment.

Fully Functional Rover as of September 2025
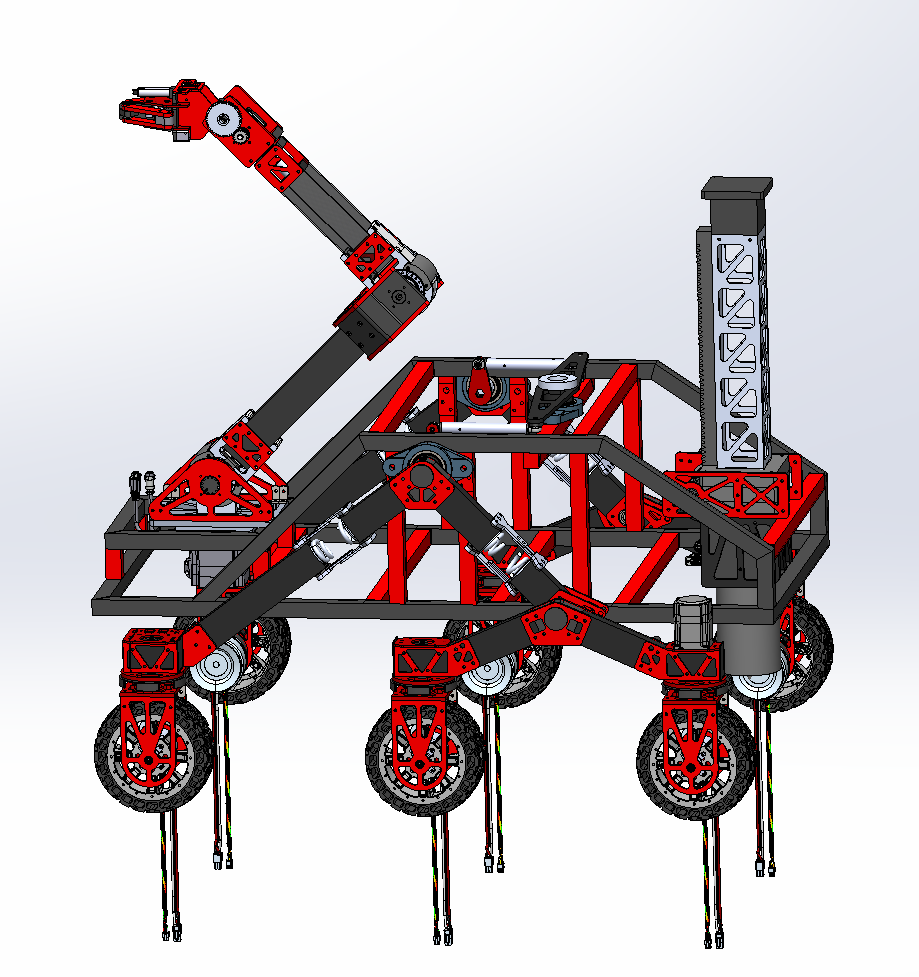
Rover CAD as of December 2024
In Spring 2025 we shifted into fabrication. I worked closely with the mechanical subteam to machine and assemble the rocker-bogie suspension and five-degree-of-freedom robotic arm—using machines such as the mill, lathe, waterjet, and 3D printers for custom parts. That semester, the electrical team implemented inverse kinematics to control the arm and tested the power system, while the software team began developing computer vision and object-detection algorithms. Over Summer 2025, we machined and assembled the welded aluminum chassis, completed the drive system, and tested drivetrain performance.
Rover Driving as of September 2025
By September 2025, we had a fully functional rover capable of driving, arm manipulation, and integrated across mechanical, electrical, and software systems. Our working robot not only validated our design but also helped us grow to over 50 committed members. With this larger team and a solid foundation, we are now refining the rover—lightening the arm and suspension, improving both drive and arm smoothness, implementing autonomous navigation and object detection, advancing the science payload, and building a more robust power management system with reorganized electronics for aesthetics and usability. The link to our team’s website.

First Team Meeting of Fall 2025 Semester
Rover Driving as of September 2025
Arm Manipulation as of May 2025

SolidWorks FEA Analysis of Chassis